Next: About this document ...
Up: 4/02/2003 by Randhir Kumar
Previous: 4/02/2003 by Randhir Kumar
Definition 5.1.1
Stability
The equilibrium is stable if for each

and each

there exists a
 |
(5.1) |
such that
 |
(5.2) |
where

is the initial Condition.

is the solution trajectory (Starting from initial condition and initial time

)
It is uniformly stable if for each
there exists
 such that
such that
 .
.
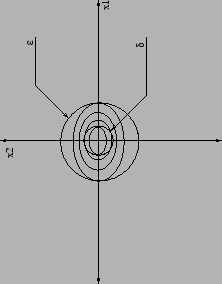
Example 5.1.1
Figure 5.1:
Stable Equilibrium
 |
Example 5.1.2
Figure 5.2:
Unstable Equilibrium
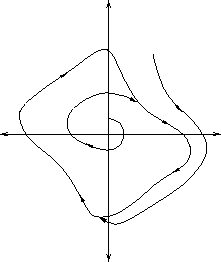 |
no  can be found for this
can be found for this
 . If we take
sufficiently large to contain the limit cycle then we can find a which satisfies the stablity criterion but is should be true for each and every .
. If we take
sufficiently large to contain the limit cycle then we can find a which satisfies the stablity criterion but is should be true for each and every .
Definition 5.1.2
The equilbrium

is attractive if for each

there is

such that
 as as  |
(5.9) |
Definition 5.1.3
It is uniformly attractive if there is

such that
 |
(5.10) |
as

uniformly in

Attractivity doesn't imply stability and vice versa.
Another Definiton of stability: Asymptotic Stability
Definition 5.1.4
Equilibrium
is uniformly asymptotically stable if it stable and attractive.
Definition 5.1.5
Equilibrium
is uniformly asymptotically stable if it is uniformly stable and uniformly attractive.
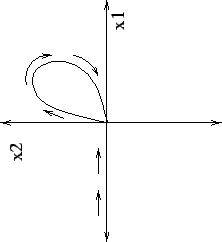
Example 5.1.3
Vinograd's Equation (1957)
equilibrium

Figure 5.3:
Not Stable but attractive
 |
Definition 5.1.6
Exponentional Stability
Equilibrium
is
exponentionally stable if there exists constants

such that
![$\displaystyle \vert\vert S(t,t_{0,}X_{0})\vert\vert\leq a\vert\vert X_{0}\vert\vert e^{[-b(t-t_{0})]}$](img177.png) |
(5.13) |
for all

and

All the linear systems if they are stable, they an exponentially stable.
Definition 5.1.8
it Function of Class K and Class L
Function
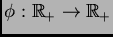
is of class K if it is continuous, strictly increasing, and

. It is class L if it is continuous on

strictly decreasing,

,

as

Figure 5.4:
Class K
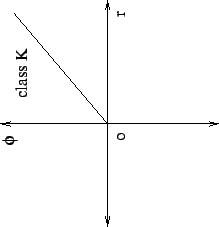 |
Figure 5.5:
Class L
 |
V is decrescent if there exists a constant  and a function
and a function  of class K such that
of class K such that
 and
and
 V is radially unbounded if * is satisfied for some
V is radially unbounded if * is satisfied for some
 (not necessarily class K) with additional property
(not necessarily class K) with additional property
 as
as
Figure 5.6:
Radially Unbounded
|



Next: About this document ...
Up: 4/02/2003 by Randhir Kumar
Previous: 4/02/2003 by Randhir Kumar
Vishal Mahulkar (98D10043)
2003-02-14
![$\displaystyle = \frac{x_{1}^{2}(x_{2}-x_{1})+x_{2}^{5}}{x_{1}^{2}+x_{2}^{2}[1+(x_{1}^{2}+x_{2}^{2})^{2}]}$](img172.png)
![$\displaystyle =\frac{x_{2}^{2}(x_{2}-2x_{1})}{(x_{1}^{2}+x_{2}^{2})[1+(x_{1}^{2}+x_{2}^{2})^{2}]}$](img173.png)