

Prof. Saurav Agarwal
- AI/ML and Computational Engineering
- Robotics, Dynamics and Control
Swarm Robotics, Design of Mobile Robots, Optimisation, Deep Learning, Approximation Algorithms
- Ph.D., Computer Science, University of North Carolina at Charlotte, USA (2022)
- B.Tech. Mechanical Engineering, NIT Durgapur (2013)
- Postdoctoral Fellow, University of Pennsylvania, USA (2022–2025)
- Project Officer, Indian Institute of Technology Madras (2013–2016)
W. Gosrich, S. Agarwal, K. Garg, S. Mayya, M. Malencia, M. Yim, V. Kumar,
Online Multi-Robot Coordination and Cooperation with Task Precedence Relationships, IEEE Transactions on Robotics, 41, 2025, 10.1109/TRO.2025.3613558, 5854--5874, https://doi.org/10.1109/TRO.2025.3613558
Online Multi-Robot Coordination and Cooperation with Task Precedence Relationships, IEEE Transactions on Robotics, 41, 2025, 10.1109/TRO.2025.3613558, 5854--5874, https://doi.org/10.1109/TRO.2025.3613558
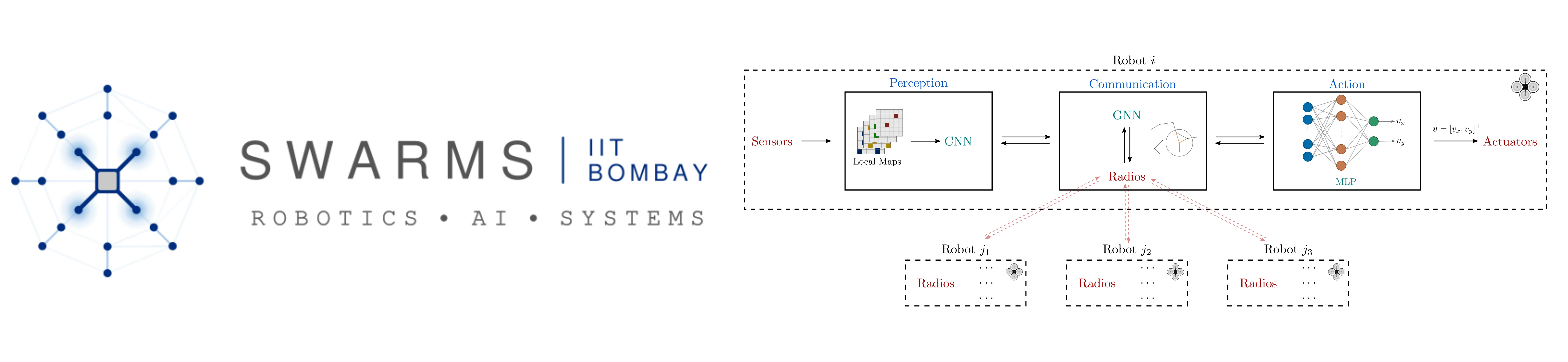
S. Agarwal, R. Muthukrishnan, W. Gosrich, V. Kumar, A. Ribeiro,
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control, IEEE Transactions on Robotics, 41, 2025, 10.1109/TRO.2025.3619047, 5986--6005, https://doi.org/10.1109/TRO.2025.3619047
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control, IEEE Transactions on Robotics, 41, 2025, 10.1109/TRO.2025.3619047, 5986--6005, https://doi.org/10.1109/TRO.2025.3619047
S. Agarwal, S. Akella,
Line Coverage with Multiple Robots: Algorithms and Experiments, IEEE Transactions on Robotics, 40, 2024, 10.1109/TRO.2024.3355802, 1664--1683, https://doi.org/10.1109/TRO.2024.3355802
Line Coverage with Multiple Robots: Algorithms and Experiments, IEEE Transactions on Robotics, 40, 2024, 10.1109/TRO.2024.3355802, 1664--1683, https://doi.org/10.1109/TRO.2024.3355802
Y. Tao, X. Liu, I. Spasojevic, S. Agarwal, V. Kumar,
3D Active Metric-Semantic SLAM, IEEE Robotics and Automation Letters, 9, 3, 2024, 10.1109/LRA.2024.3363542, https://doi.org/10.1109/LRA.2024.3363542
3D Active Metric-Semantic SLAM, IEEE Robotics and Automation Letters, 9, 3, 2024, 10.1109/LRA.2024.3363542, https://doi.org/10.1109/LRA.2024.3363542
S. Agarwal, S. Akella,
The Single Robot Line Coverage Problem: Theory, Algorithms, and Experiments, Networks, 82, 2023, 10.1002/net.22171, 479--505, https://doi.org/10.1002/net.22171
The Single Robot Line Coverage Problem: Theory, Algorithms, and Experiments, Networks, 82, 2023, 10.1002/net.22171, 479--505, https://doi.org/10.1002/net.22171