


Next: 17/1/2003 by Chachra
Up: 14/01/2003 by Ajit Shegaonkar
Previous: Analyse Rocket Altitude Control
A Capacitor(C) and Inductor(L) are connected in series across a battery
which provides variable supply voltage ( ) which varies with the
current as given by the following equation. The Capacitor and Inductor are
respectively rated at
) which varies with the
current as given by the following equation. The Capacitor and Inductor are
respectively rated at
 farad and 1 Henry. Analyse the
system for its stability and response.
Supply voltage ():-
farad and 1 Henry. Analyse the
system for its stability and response.
Supply voltage ():-
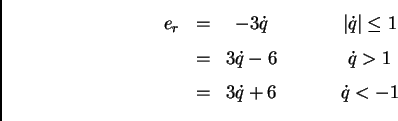 |
(1.6) |
The system can be mathematically expressed as :-
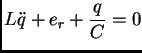 |
(1.7) |
For the state space representation, state space variables are:-
 |
(1.8) |
For
 i.e.
i.e.
 , we have,
, we have,
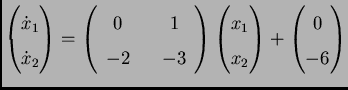
and the state space representation is :-
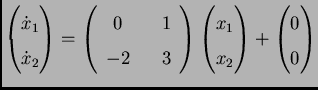 |
(1.11) |
the equillibrium point is (0,0), the eigenvalues are  and hence the equillibrium
point is an unstable node.
For
and hence the equillibrium
point is an unstable node.
For
 i.e.
i.e.  , we have,
, we have,
and the state space representation is :-
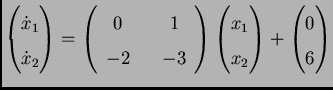 |
(1.14) |
the equillibrium point is (3,0), the eigenvalues are  and hence the
equillibrium point is a stable node. But this equillibrium point does not lie in the range
over which the function is defined, hence the equillibrium point is a virtual equillibrium
point and the trajectories will never converge to this stable node.
For
and hence the
equillibrium point is a stable node. But this equillibrium point does not lie in the range
over which the function is defined, hence the equillibrium point is a virtual equillibrium
point and the trajectories will never converge to this stable node.
For
 i.e.
i.e.  , we have,
, we have,
and the state space representation is :-
 |
(1.17) |
the equillibrium point is (-3,0), the eigenvalues are and hence the
equillibrium point is a stable node. But this equillibrium point does not lie in the range
over which the function is defined, hence the equillibrium point is a virtual equillibrium
point and the trajectories will never converge to this stable node.
The solution trajectory (phase portrait) is given below :
Trajectory2



Next: 17/1/2003 by Chachra
Up: 14/01/2003 by Ajit Shegaonkar
Previous: Analyse Rocket Altitude Control
Vishal Mahulkar (98D10043)
2003-02-14